Práctica 1: Semáforo.

Código del proyecto: fPrGTdhH
Práctica 2: Pulsador y Led

Código del proyecto: pWAL172i
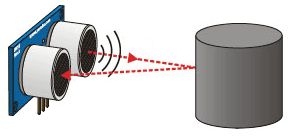
Práctica 3: Midiendo distancias con el sensor de ultrasonidos HC-SR04.


Un sensor de ultrasonidos es un dispositivo para medir distancias. Su funcionamiento se basa en el envío de un pulso de alta frecuencia, no audible por el ser humano. Este pulso rebota en los objetos cercanos y es reflejado hacia el sensor, que dispone de un micrófono adecuado para esa frecuencia. Conociendo el tiempo entre pulsos y la velocidad del sonido podemos estimar la distancia al objeto.
Más información en:
https://www.luisllamas.es/medir-distancia-con-arduino-y-sensor-de-ultrasonidos-hc-sr04/
Código del proyecto: 6R3oyXjY
Práctica 4: Poniendo en marchas los motores del mClon (Driver TB6612FNG)
Una vez montado nuestro mClon una de las primeras pruebas que haremos será la de comprobar el funcionamiento de los motores. El mClon utiliza en driver TB6612FNG para poder alimentar con suficiente corriente los motores (los pines de Arduino no dan suficiente corriente para moverlos) y para controlar el giro de los dos motores, es decir cambiar la polaridad. Para ello utilizaremos la shieldClon, que lleva dicho driver. |
| Imagen extraída de Tecnoloxia.org |

